
摘 要
西南交通大学材料学院邓维礼副教授和杨维清教授团队创新性地开发了一种具有双足结构的弛豫铁电软体机器人。该软体机器人采用双键钉扎效应构筑的小畴结构弛豫铁电聚合物(P(VDF-TrFE-CFE-FA))作为功能层,实现了兼具低场大应变和高稳定性的驱动器件。相同电场下,平面薄膜的弯曲角是商用PVDF薄膜的五倍。集成至双足软体机器人后,该系统展现出卓越的驱动性能,可在10 V μm-1、560 Hz条件下实现约19 BL s-1的高速运动。
文章简介
受自然界生物体启发,多功能仿生软体机器人已成为智能材料与机器人领域的研究热点。相比传统刚性机器人,软体机器人在复杂、非结构化环境中展现出优异的适应性和稳定性。在多种驱动机制中,电驱动材料因其质量轻、响应快、应变大等优点而备受青睐。然而,传统电驱材料普遍存在驱动电压过高的问题,不仅增加了电路设计的复杂性,也显著提升了击穿风险。近年来,以P(VDF-TrFE-CFE)为代表的弛豫铁电聚合物的出现,为实现低电压驱动、高变形量、稳定可靠的面外变形致动器提供了全新策略。
近日,西南交通大学材料学院邓维礼副教授和杨维清教授团队创新性地开发了一种具有双足结构的弛豫铁电软体机器人。该软体机器人采用双键钉扎效应构筑的小畴结构弛豫铁电聚合物(P(VDF-TrFE-CFE-FA))作为功能层,实现了兼具低场大应变和高稳定性的驱动器件。相同电场下,平面薄膜的弯曲角是商用PVDF薄膜的五倍。集成至双足软体机器人后,该系统展现出卓越的驱动性能,可在10 V μm-1、560 Hz条件下实现约19 BL s-1的高速运动。相关研究成果以“Low electric field-driven and fast-moving relaxor ferroelectric soft robots”为题发表于国际知名期刊InfoMat,为基于弛豫铁电材料的高性能软体机器人设计提供了重要参考。材料学院2022级硕士研究生黄龙超为论文第一作者,邓维礼副教授和杨维清教授为论文通讯作者。研究工作得到了国家自然科学基金、四川省科技计划、西南交通大学基础培育等项目支持。

图1 材料设计和工作机构示意图。(A)受猎豹奔驰步态的启发,基于P(VDF-TrFE-CFE-FA)设计了一种具有双足结构的软机器人,该机器人可以通过将聚合物链的3/1螺旋翻转成全反式β构象来执行爬行和承载,从而在较低的电场下形成水平膨胀的电应变。(B)P(VDF-TrFE-CFE-FA)结构域细化示意图。在P(VDF-TrFE-CFE)中引入FA可以细化晶畴并降低局部极化势垒,从而获得更好的电应变性能。
研究团队在P(VDF-TrFE-CFE)中引入了FA单元,通过双键钉扎效应破坏长程铁电畴,实现了晶畴尺寸的调控。利用核磁共振氢谱(NMR)、傅里叶红外光谱(FT-IR)、X射线衍射(XRD)、原子力显微镜(AFM)等表征手段,系统分析了FA引入对晶区结构带来的影响。研究结果表明,FA的引入有效降低了晶粒尺寸,实现聚合物晶粒尺寸的调控,为设计高性能弛豫铁电聚合物提供了参考。
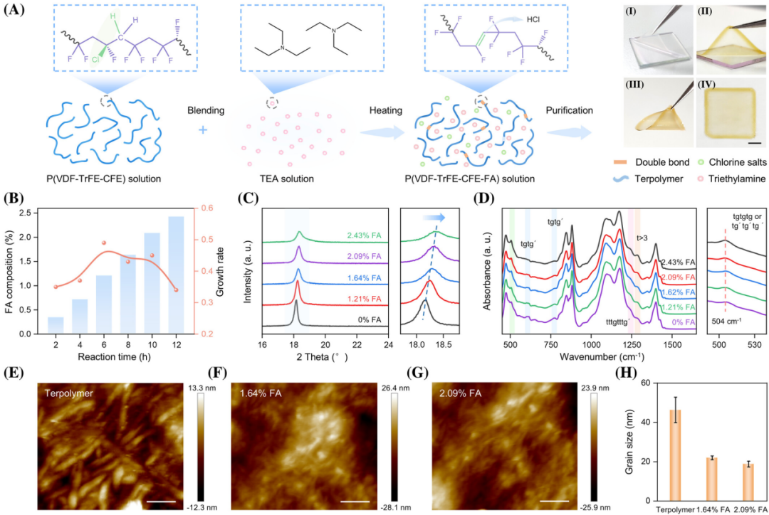
图2 P(VDF-TrFE-CFE-FA)的合成和结构表征。(A)四聚物薄膜制备的示意图和数字照片。比例尺为5毫米。(B)反应时间与四聚物中 FA 含量之间的关系。(C)不同FA含量的四聚物的XRD图谱。(D)不同FA含量的四聚物的FTIR光谱。(E-G)不同FA含量的四聚物的AFM表面形貌。比例尺为200 nm。(H)不同FA含量的四聚物的晶粒尺寸。
为了研究将FA引入三元共聚物对铁电响应的影响,研究团队对具有不同FA含量的四聚物进行了电性能测试。对于弛豫铁电材料,电场下的应变主要来自电致伸缩效应和麦克斯韦应力,其中电致伸缩效应占主导。这种电致伸缩应变主要是来自于四聚物的3/1螺旋构象到全反式构象的转变,导致宏观厚度收缩和水平膨胀。实验结果表明,FA含量为2.09 mol%的四聚物中存在弥散的、接近临界终点的转变,性能达到最佳。
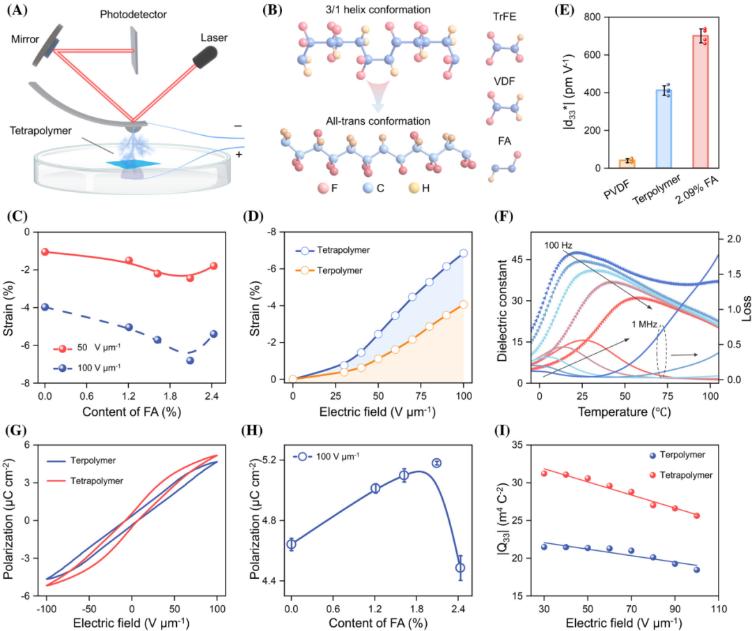
图3 材料的介电和机电性能表征。(A)铁电性测试示意图。(B)P(VDF-TrFE-FA)中3/1螺旋和全反式构象之间的构象翻转示意图。(C)厚度应变S3在50和100 V μm−1电场下具有不同FA含量的四聚物(10 Hz)。(D)不同电场(10 Hz)下FA含量为2.09 mol%的三元共聚物和四共聚物的厚度收缩。(E)比较|d33*|在100 V μm−1时用于FA含量为2.09 mol%的商用PVDF、三元共聚物和四聚物。(F)FA含量为2.09 mol%的P(VDF-TrFE-CFE-FA)的介电性能随温度的变化。(G)FA含量为2.09 mol%的三元共聚物和四聚物的P-E环。(H)FA含量对P(VDF-TrFE-CFE-FA)极化强度的影响。(I)电致伸缩系数|d33*|用于不同电场下FA含量为2.09 mol%的三元共聚物和四元共聚物。
为了评估开发的弛豫铁电材料的电应变性能,研究团队制备了具有非对称结构的多层器件。在电场下,四聚物主要发生厚度收缩,将其粘附在高模量薄膜上将导致非对称的水平膨胀产生,从而实现薄膜的面外弯曲。实验结果表明,器件在较低电场下具有优异的电应变性能和稳定性,这为后续软体机器人的发展奠定了基础。
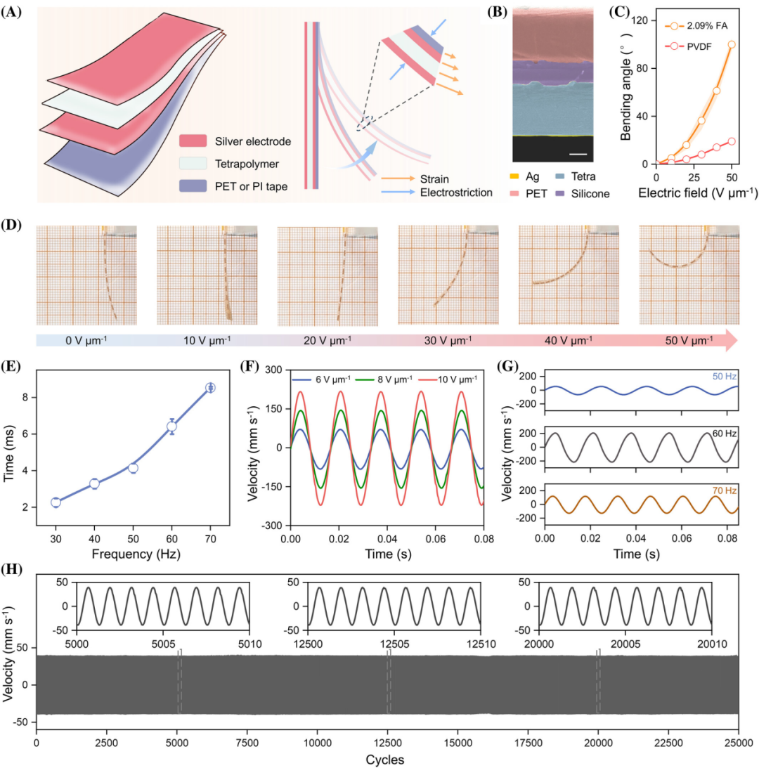
图4 多层器件的结构和电应变性能。(A)器件的多层结构示意图。(B)所设计多层器件的横截面SEM图像。比例尺为10 μm。(C)比较商用PVDF和四元聚合物薄膜的电应变性能。(D)器件在不同电场下的数码照片。(E)器件在不同频率下对10 V μm-1交流电场的响应时间。(F)器件在60 Hz不同交流电场下的位移速度与时间的关系。(G)器件在不同频率10 V μm-1交流电场下的位移速度与时间的关系。(H)器件的循环稳定性测试:在50Hz、6 V μm-1的交流电场下25000次循环。
利用开发的弛豫铁电材料优异的电学性能,研究团队设计了两种不同结构的软体机器人以验证材料在直流电场和交流电场下的性能。实验结果表明,开发的花瓣结构软体机器人和具有仿生结构设计的双足机器人均具有优异的性能。
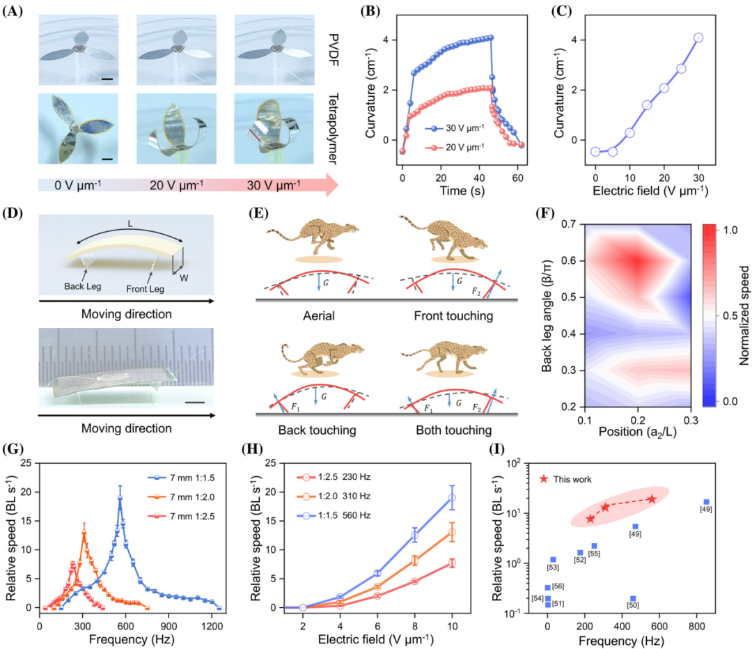
图5 软体机器人的结构设计和性能表征。(A)聚偏二氟乙烯和四元共聚物的花瓣结构软机器人在不同直流电场下的数码照片。比例尺为5毫米。(B)花瓣结构软机器人在30 V μm-1直流电场下的曲率与时间关系。(C)不同直流电场下花瓣结构软机器人的曲率。(D)所设计软机器人的结构示意图和数码照片。比例尺为2.5 mm。(E)软机器人在移动过程中的步态和受力分析。灰线表示初始状态,红线表示膨胀或收缩后的形状。(F)尺寸为10×20毫米的机器人的归一化速度与相对后腿位置(a2/L)和相对后腿角度(β/π)函数的实验结果等值线图。(G)固定宽度为7毫米的软体机器人在10 V μm-1电场下不同长宽比的速度与频率关系。(H)不同几何形状的软机器人在共振频率下的电场强度与速度的关系。(I)软机器人的相对速度和驱动频率与之前报道的具有类似结构的软机器人的比较。
作为概念验证,研究团队验证了开发的双足软机器人的各种功能,如攀爬和承载等。实验结果表明,软体机器人在斜坡上仍能保持较高的速度,并且能承载超过自身两倍重量的重物,所开发的软体机器人具有复杂环境运输的能力,这些特点为开发基于弛豫铁电材料的软体机器人带来了更多的可能性,有望增强软体机器人的功能集成并促进其应用。
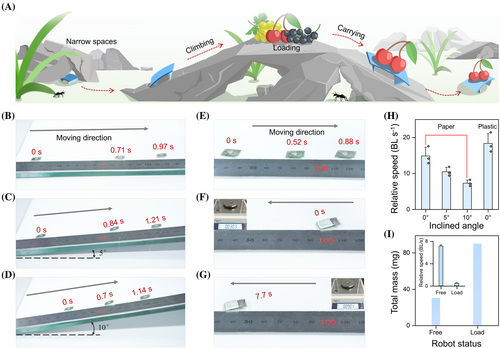
图6 软体机器人的攀爬和承载能力。(A)软机器人的功能演示示意图,包括穿越缝隙、爬坡和承载负荷。(B-D)开发的软体机器人(7×10.5 mm)在不同坡度的纸上攀爬的截图,包括平面、5°坡度和10°坡度。(E-G)软体机器人(9×13.5 mm)在有负载和无负载情况下的爬行姿态截图。(H)软体机器人在不同坡度基底上的爬行速度统计。(I)软体机器人的负载情况和运动速度。
论文信息
Low electric field-driven and fast-moving relaxor ferroelectric soft robots
Longchao Huang, Weili Deng*, Guo Tian, Yue Sun, Tao Yang, Boling Lan, Xuelan Li, Yang Liu, Tianpei Xu, Shenglong Wang, Yong Ao, Jieling Zhang, Long Jin, Weiqing Yang*
DOI: 10.1002/inf2.70015
Citation: InfoMat, 2025, e70015
